Zoekresultaten voor "raspberry OR pi OR compute OR module OR 4 OR io OR board"
-
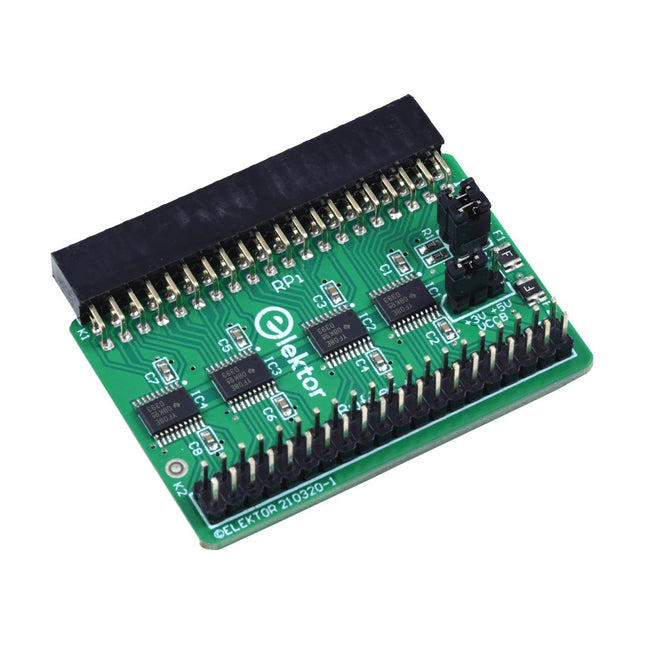
Elektor Labs Elektor Raspberry Pi Buffer Board
Wanneer u regelmatig experimenteert met de Raspberry Pi en verschillende externe hardware aansluit op de GPIO-poort via de header, heeft u mogelijk in het verleden schade veroorzaakt. Het Elektor Raspberry Pi Buffer Board is er om dit te voorkomen! Het board is compatibel met de Raspberry Pi Zero, Zero 2 (W), 3, 4, 5, 400 en 500. Alle 26 GPIO's zijn gebufferd met bidirectionele spanningsomzetters om de Raspberry Pi te beschermen tijdens het experimenteren met nieuwe circuits. De printplaat is bedoeld om aan de achterkant van de Raspberry Pi 400/500 te worden geplaatst. De connector voor aansluiting op de Raspberry Pi is een haakse 40-polige connector (2x20). De printplaat is slechts iets breder. Een 40-polige flatcable met bijpassende 2x20 headers kan worden aangesloten op de buffer-uitgangsheader om bijvoorbeeld te experimenteren met een circuit op een breadboard of een printplaat. Het circuit maakt gebruik van 4x TXS0108E IC's van Texas Instruments. De printplaat kan ook rechtop op een Raspberry Pi worden geplaatst. Downloads Schematics Layout
€ 34,95€ 29,95
Beste prijs
-

Raspberry Pi Foundation Raspberry Pi 4 Case Fan
Designed for overclockers and other power users, this fan keeps your Raspberry Pi 4 at a comfortable operating temperature even under heavy load. The temperature-controlled fan delivers up to 1.4 CFM of airflow over the processor, memory, and power management IC. The bundled heatsink (18 x 8 x 10 mm) with self-adhesive pad improves heat transfer from the processor. The Raspberry Pi 4 Case Fan works with Raspberry Pi 4 and the official Raspberry Pi 4 case.
€ 6,95€ 2,78
Beste prijs
-

Robotis Robotis TurtleBot3 Waffle Pi (incl. Raspberry Pi 4)
World’s Most Popular ROS PlatformTurtleBot is the most popular open source robot for education and research. The new generation TurtleBot3 is a small, low cost, fully programmable, ROS based mobile robot. It is intended to be used for education, research, hobby and product prototyping.Affordable CostTurtleBot was developed to meet the cost-conscious needs of schools, laboratories and companies. TurtleBot3 is the most affordable robot among the SLAM-able mobile robots equipped with a 360° Laser Distance Sensor LDS-01.ROS StandardThe TurtleBot brand is managed by Open Robotics, which develops and maintains ROS. Nowadays, ROS has become the go-to platform for all the roboticists around the world. TurtleBot can be integrated with existing ROS-based robot components, but TurtleBot3 can be an affordable platform for whom want to get started learning ROS.ExtensibilityTurtleBot3 encourages users to customize its mechanical structure with some alternative options: open source embedded board (as a control board), computer and sensors. TurtleBot3 Waffle Pi is a two-wheeled differential drive type platform but it is able to be structurally and mechanically customized in many ways: Cars, Bikes, Trailers and so on. Extend your ideas beyond imagination with various SBC, sensors and motors on a scalable structure.Modular Actuator for Mobile RobotTurtleBot3 is able to get a precise spatial data by using 2 DYNAMIXEL’s in the wheel joints. DYNAMIXEL XM series can be operated by one of 6 operating modes (XL series: 4 operating modes): Velocity control mode for wheels, Torque control mode or Position control mode for joint, etc. DYNAMIXEL can be used even to make a mobile manipulator which is light but can be precisely controlled with velocity, torque and position control. DYNAMIXEL is a core component that makes TurtleBot3 perfect. It is easy to assemble, maintain, replace and reconfigure.Open Control Board for ROSThe control board is open-sourced in hardware wise and in software wise for ROS communication. The open source control board OpenCR1.0 is powerful enough to control not only DYNAMIXEL’s but also ROBOTIS sensors that are frequently being used for basic recognition tasks in cost effective way. Various sensors such as Touch sensor, Infrared sensor, Color sensor and a handful more are available. The OpenCR1.0 has an IMU sensor inside the board so that it can enhance precise control for countless applications. The board has 3.3 V, 5 V, 12 V power supplies to reinforce the available computer device lineups.Open SourceThe hardware, firmware and software of TurtleBot3 are open source which means that users are welcomed to download, modify and share source codes. All components of TurtleBot3 are manufactured with injection molded plastic to achieve low cost, however, the 3D CAD data is also available for 3D printing.Specifications Maximum translational velocity 0.26 m/s Maximum rotational velocity 1.82 rad/s (104.27 deg/s) Maximum payload 30 kg Size (L x W x H) 281 x 306 x 141 mm Weight (+ SBC + Battery + Sensors) 1.8 kg Threshold of climbing 10 mm or lower Expected operating time 2h Expected charging time 2h 30m SBC (Single Board Computers) Raspberry Pi 4 (2 GB RAM) MCU 32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS) Remote Controller RC-100B + BT-410 Set (Bluetooth 4, BLE) Actuator XL430-W210 LDS (Laser Distance Sensor) 360 Laser Distance Sensor LDS-01 or LDS-02 Camera Raspberry Pi Camera Module v2.1 IMU Gyroscope 3 AxisAccelerometer 3 Axis Power connectors 3.3 V/800 mA5 V/4 A12 V/1 A Expansion pins GPIO 18 pinsArduino 32 pin Peripheral 3x UART, 1x CAN, 1x SPI, 1x I²C, 5x ADC, 4x 5-pin OLLO DYNAMIXEL ports 3x RS485, 3x TTL Audio Several programmable beep sequences Programmable LEDs 4x User LED Status LEDs 1x Board status LED1x Arduino LED1x Power LED Buttons and Switches 2x Push buttons, 1x Reset button, 2x Dip switch Battery Lithium polymer 11.1 V 1800 mAh / 19.98 Wh 5C PC connection USB Firmware upgrade via USB / via JTAG Power adapter (SMPS) Input: 100-240 VAC 50/60 Hz, 1.5 A @maxOutput: 12 VDC, 5 A Downloads ROS Robot Programming GitHub E-Manual Community
€ 1.879,00
Beste prijs
-

Raspberry Pi Foundation Official Case for Raspberry Pi 4 (white/red)
Official Case for Raspberry Pi 4 (white/red)
€ 7,95€ 3,18
Beste prijs
-
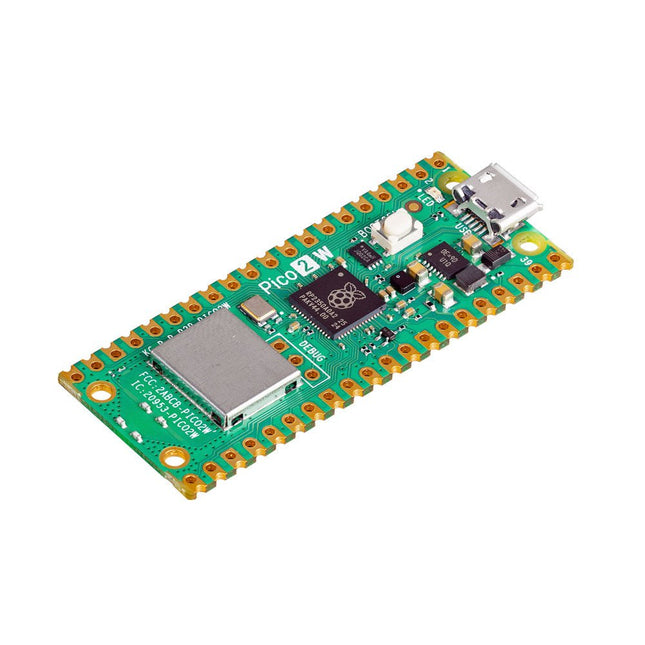
Raspberry Pi Foundation Raspberry Pi Pico 2 W
De Raspberry Pi Pico 2 W is een microcontrollerbord gebaseerd op de RP2350 met 2,4 GHz 802.11n wireless LAN en Bluetooth 5.2. Het geeft u nog meer flexibiliteit in uw IoT- of slimme productontwerpen en breidt de mogelijkheden voor uw projecten uit. De RP2350 biedt een uitgebreide beveiligingsarchitectuur gebouwd rond Arm TrustZone voor Cortex-M. Het bevat ondertekend opstarten, 8 KB antifuse OTP voor sleutelopslag, SHA-256-versnelling, een hardware TRNG en snelle glitch-detectoren. Dankzij de unieke dual-core en dual-architectuurmogelijkheden van de RP2350 kunnen gebruikers kiezen tussen een paar industriestandaard Arm Cortex-M33-kernen en een paar open-hardware Hazard3 RISC-V-kernen. Programmeerbaar in C/C++ en Python, en ondersteund door gedetailleerde documentatie, is de Raspberry Pi Pico 2 W het ideale microcontrollerbord voor zowel liefhebbers als professionele ontwikkelaars. Specificaties CPU Dual Arm Cortex-M33 of dubbele RISC-V Hazard3-processors @ 150 MHz Wireless Geïntegreerde Infineon CYW43439 single-band 2,4 GHz 802.11n wireless LAN en Bluetooth 5.2 Geheugen 520 KB SRAM op de chip; 4 MB ingebouwde QSPI-flitser Interfaces 26 multifunctionele GPIO-pinnen, waaronder 4 die kunnen worden gebruikt voor AD Randapparatuur 2x UART 2x SPI-controllers 2x I²C-controllers 24x PWM-kanalen 1x USB 1.1-controller en PHY, met host- en apparaatondersteuning 12x PIO-statusmachines Ingangsvermogen 1,8-5,5 V DC Afmetingen 21 x 51 mm Downloads Datasheet Pinout Schematic
€ 7,95
Beste prijs
-

Raspberry Pi Foundation Bumper voor Raspberry Pi 5
De Raspberry Pi Bumper is een opklikbare siliconen hoes die de onderkant en randen van de Raspberry Pi 5 beschermt. Kenmerken Flexibele siliconenrubberen bumper uit één stuk Maakt gemakkelijke toegang tot de aan/uit-knop mogelijk Bevestigingsgaten blijven toegankelijk onder de bumper Downloads Datasheet
€ 3,50€ 1,40
Beste prijs
-
Elektor Publishing Raspberry Pi 5 for Radio Amateurs
Program and Build Raspberry Pi 5 Based Ham Station Utilities with the RTL-SDR The RTL-SDR devices (V3 and V4) have gained popularity among radio amateurs because of their very low cost and rich features. A basic system may consist of a USB based RTL-SDR device (dongle) with a suitable antenna, a Raspberry Pi 5 computer, a USB based external audio input-output adapter, and software installed on the Raspberry Pi 5 computer. With such a modest setup, it is possible to receive signals from around 24 MHz to over 1.7 GHz. This book is aimed at amateur radio enthusiasts and electronic engineering students, as well as at anyone interested in learning to use the Raspberry Pi 5 to build electronic projects. The book is suitable for both beginners through experienced readers. Some knowledge of the Python programming language is required to understand and eventually modify the projects given in the book. A block diagram, a circuit diagram, and a complete Python program listing is given for each project, alongside a comprehensive description. The following popular RTL-SDR programs are discussed in detail, aided by step-by-step installation guides for practical use on a Raspberry Pi 5: SimpleFM GQRX SDR++ CubicSDR RTL-SDR Server Dump1090 FLDIGI Quick RTL_433 aldo xcwcp GPredict TWCLOCK CQRLOG klog Morse2Ascii PyQSO Welle.io Ham Clock CHIRP xastir qsstv flrig XyGrib FreeDV Qtel (EchoLink) XDX (DX-Cluster) WSJT-X The application of the Python programming language on the latest Raspberry Pi 5 platform precludes the use of the programs in the book from working on older versions of Raspberry Pi computers.
€ 39,95
Leden: € 35,96
-

Elektor Bundles Learn Edge AI with Raspberry Pi
Met deze praktische bundel kun je echte Edge AI-toepassingen bouwen met de Raspberry Pi Raspberry Pi AI HAT+ (13 TOPS) De Raspberry Pi AI HAT+ is een uitbreidingsbord ontworpen voor de Raspberry Pi 5, met een geïntegreerde Hailo AI-accelerator. Deze add-on biedt een kosteneffectieve, efficiënte en toegankelijke aanpak voor het integreren van hoogwaardige AI-mogelijkheden, met toepassingen die procescontrole, beveiliging, huisautomatisering en robotica omvatten. De AI HAT+ wordt aangesloten via de PCIe Gen3-interface van de Raspberry Pi 5. Wanneer de Raspberry Pi 5 een huidige versie van het Raspberry Pi OS draait, detecteert deze automatisch de ingebouwde Hailo-accelerator, waardoor de neurale verwerkingseenheid (NPU) beschikbaar wordt voor AI-taken. Bovendien ondersteunen de rpicam-apps cameratoepassingen in Raspberry Pi OS naadloos de AI-module, waarbij de NPU automatisch wordt gebruikt voor compatibele naverwerkingsfuncties. Raspberry Pi Camera Module 3 De Raspberry Pi Camera Module 3 is een compacte camera van Raspberry Pi. Hij heeft een IMX708 12-megapixelsensor met HDR, en beschikt over autofocus met fasedetectie. Camera Module 3 is verkrijgbaar in standaard en groothoek varianten, beide met of zonder infrarood filter. De Camera Module 3 kan worden gebruikt om zowel full HD video als foto's te maken, en heeft een HDR-modus tot 3 megapixels. De werking ervan wordt volledig ondersteund door de libcamera bibliotheek, inclusief de snelle autofocus functie van Camera Module 3: dit maakt het gemakkelijk voor beginners om te gebruiken, terwijl het genoeg biedt voor gevorderde gebruikers. Camera Module 3 is compatibel met alle Raspberry Pi computers. Boek: Learn Edge AI with Raspberry Pi – AI Projects for the Raspberry Pi with the AI HAT+ Edge AI transformeert alledaagse apparaten door intelligentie te plaatsen waar die het meest nodig is: rechtstreeks in de hardware. Met on-device inferentie kan een camera een bezoeker onmiddellijk herkennen, kan een telefoon spraak vertalen zonder audio naar de cloud te streamen, en kan een wearable in realtime afwijkingen detecteren – snel, privé en betrouwbaar, zelfs wanneer de netwerkverbinding wegvalt. Dit boek is uw praktische gids voor het bouwen van precies dit soort systemen met de Raspberry Pi AI HAT+ en de Hailo-8L-accelerator. U begint met heldere basisprincipes: kernconcepten van AI en machine learning, hoe neurale netwerken werken en wat Edge AI werkelijk onderscheidt van Cloud AI – plus een eerlijke blik op ethische overwegingen en toekomstige impact. Deze bundel bevat: Boek: Edge AI Made Practical Raspberry Pi AI HAT+ (13 TOPS) Raspberry Pi Camera Module 3 Actieve koeler voor Raspberry Pi 5 FPC Display-kabel voor Raspberry Pi 5 (200 mm) Elektor Edge AI Kit 40-pins GPIO-header Verkeerslichtmodule Rode LED 5 V met ingebouwde weerstand Gele LED 5 V met ingebouwde weerstand Groene LED 5 V met ingebouwde weerstand Blauwe LED 5 V met ingebouwde weerstand Breadboard (400 aansluitpunten) 10 Dupont-draden (male-female) DHT22-sensormodule Servomotor
€ 169,95
Beste prijs
-

Raspberry Pi Foundation Raspberry Pi RP2040 Microcontroller ICs (10 stuks)
Specificaties Dubbele ARM Cortex-M0+ @ 133 MHz 264 kB on-chip SRAM in zes onafhankelijke banken Ondersteuning tot 16 MB off-chip Flash memory via speciale QSPI bus DMA-controller Volledig aangesloten AHB crossbar Interpolator en integer divider peripherals On-chip programmeerbare LDO om spanning voor de core te genereren 2x on-chip PLL's om USB en core kloksignalen te genereren 30x GPIO pins, waarvan er 4 als analoge ingangen kunnen worden gebruikt Randapparatuur 2x UARTs 2x SPI controllers 2x I²C controllers 16x PWM kanalen USB 1.1 controller en PHY, met host en device support 8x PIO state machines Wat je krijgt 10x RP2040 ICs
€ 7,95€ 3,18
Beste prijs
-
Elektor Digital Raspberry Pi Advanced Programming (E-book)
This book is about advanced programming of the Raspberry Pi computer using the Python programming language. The book explains in simple terms and with examples: How to configure the Raspberry Pi computer; How to install and use the Linux operating system and the desktop; How to write advanced programs using the Python programming language; How to use graphics in our programs; How to develop hardware based projects using the Raspberry Pi. The book starts with an introduction to the Raspberry Pi computer and covers the topics of purchasing all the necessary accessories and installing and operating the Linux operating system in command mode. The network interface of the RPi is explained in simple steps, demonstrating how the computer can be accessed remotely from a desktop or a laptop computer. The remaining parts of the book cover the Python programming language in detail, including advanced topics such as operating system calls, multitasking, interprocess synchronization and interprocess communication techniques. The important topic of network programming using UDP and TCP protocols is described with working examples. The Tkinter graphical user interface module (GUI) is described in detail with example widgets and programs. The last part of the book includes hardware projects based on using the advanced programming topics such as multitasking and interprocess communication techniques. All the projects given in the book have been fully tested and are working. Complete program listings of all projects are provided with detailed explanations.
€ 34,95
Leden: € 27,96
-
Elektor Digital Raspberry Pi Full Stack (E-book)
Dit boek neemt u mee op een wervelende tour van full-stack web applicatie ontwikkeling met behulp van Raspberry Pi. U leert hoe u een applicatie vanaf de grond kunt opbouwen. U zult ervaring en kennis opdoen van technologieën waaronder: Het Linux-besturingssysteem en de commandoregel. De programmeertaal Python. De Raspberry Pi General Purpose Input Output pins (GPIOs). De Nginx webserver. Flask Python microkader voor webtoepassingen. JQuery en CSS voor het maken van gebruikersinterfaces. Omgaan met tijdzones. Creëren van grafieken met Plotly en Google Charts. Gegevensregistratie met Google Sheet. Applets ontwikkelen met IFTTT. Het beveiligen van uw applicatie met SSL. Sms-berichten ontvangen op je telefoon met Twilio. Dit boek leert u ook hoe u een draadloze Arduino-sensorknooppunt op afstand kunt instellen en er gegevens van kunt verzamelen. Uw Raspberry Pi webapplicatie zal in staat zijn om Arduino node data te verwerken op dezelfde manier als het data verwerkt van zijn onboard sensor. Raspberry Pi Full Stack leert u veel vaardigheden die essentieel zijn voor het bouwen van Web- en Internet of Things-toepassingen. De applicatie die u in dit project zult bouwen, is een platform waarop u kunt uitbreiden. Dit is slechts het begin van wat je kunt doen met een Raspberry Pi en de software en hardware componenten die je zult leren kennen. Dit boek wordt ondersteund door de auteur via een speciale discussieruimte.
€ 34,95
Leden: € 27,96











-

, van Lobna Belarbi Elektor's Raspberry Pi-bundels: van geschikt voor beginners tot geavanceerde gebruikers
Find the Perfect Raspberry Pi Bundle for Your Skill Level Whether you're a beginner eager to explore the world of Raspberry Pi or an advanced...
